
相馬隆郎 (そうま たかお)

- 准教授,博士(工学)
- 居室: 9号館 326室
- 電話:042-677-1111
- 個人のホームページ
- 研究室のホームページ
略歴等:
- 2001年 東京都立短期大学 経営情報学科 講師
- 2006年 首都大学東京 理工学研究科 電気電子工学専攻 准教授
- 現在に至る
- 電子情報通信学会,日本ロボット学会,計測自動制御学会 各会員
専門分野
|
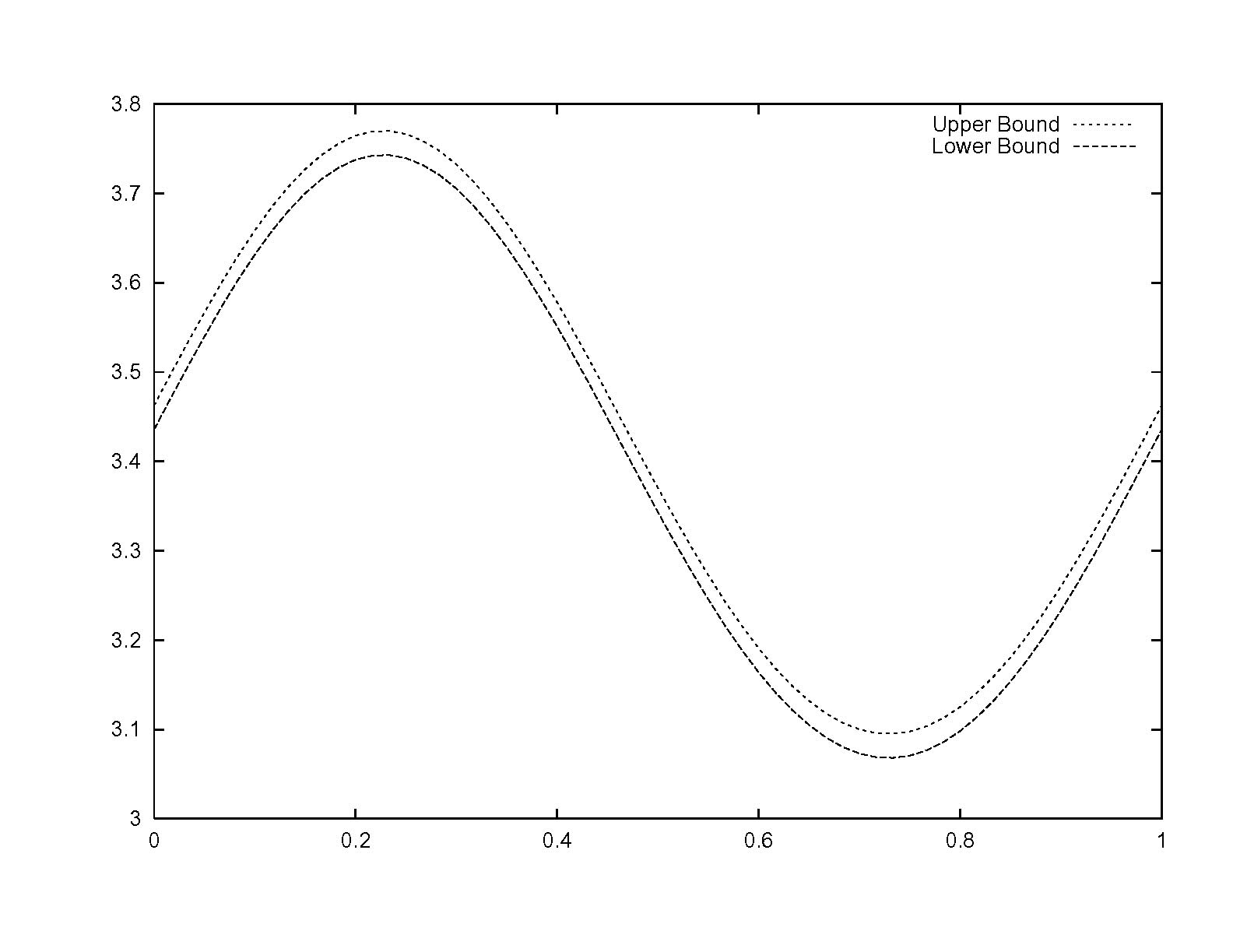
当研究室では,数値計算を行う際に生じる誤差を,計算と同時に評価する手法に関し研究を行っています.この手法では区間演算と不動点定理を組み合わせることによって,単純な丸め誤差だけでなく反復解法によって生じた誤差に対しても精度の良い評価が行えます.右の図はこの手法を用いて常微分方程式の境界値問題の解が存在する範囲を求めたものです.また一度このような解の存在範囲が特定できると,これを初期解として反復改良を行うことで,ユーザが望む任意の精度までその存在範囲を絞り込むことが可能です. |
 |
|
|
|
||
|
また当研究室では,2足歩行ロボットに関する研究も行っています.ロボットに2足歩行を行わせる研究は近年急速な進歩を遂げていますが,ロボットの歩行制御法の多くは人間のそれとは異なり,コンピュータによる多大な計算をもとに実現されています.これに対し当研究室では,人間が行っていると思われる歩行原理を模倣したタイプの歩行制御法を提案しています.この手法を用いることでより少ない計算で人間と同じように柔軟,自在な歩行を実現することを目指しています.右の図は提案手法を用いて歩行を行った際の重心軌道を,シミュレーションにより求めたものです. |
 |
|
|
|
||
主要発表論文
担当講義
|
情報リテラシー実践I(学部)
|
プログラミング基礎(学部)
|
|
|
数値計算法(学部)
|
数値解析特論(大学院)
|
|
|
|
|
|
|
|
|